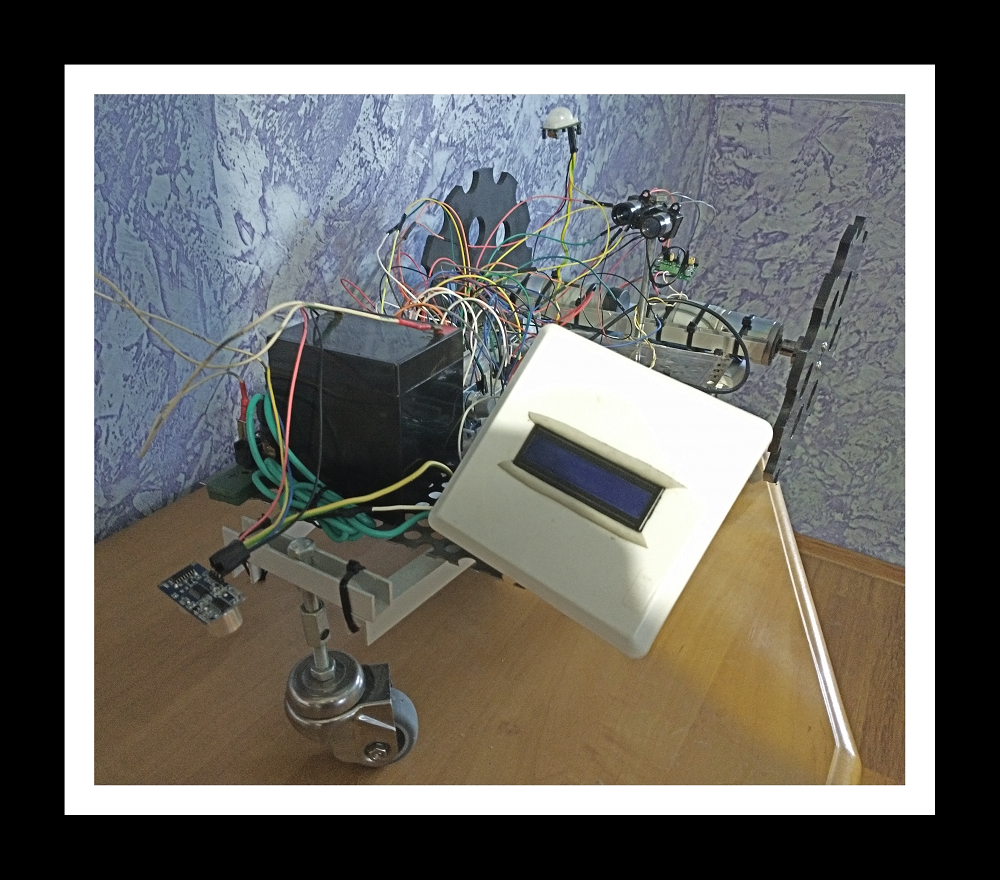
Robot typu 2WD z podparciem bazujący na platformie Raspberry Pi. Wyposażony w zestaw czujników umożliwiających pomiar temperatury, wilgotności, ciśnienia, poziomu stężenia gazów. Wykrywa obiekty ruchome za pomocą czujnika podczerwieni, śledzi odległość od obiektów z przodu za pomocą lasera Lidar, przez co jest zabezpieczony przed uderzeniami w przeszkody. Potrafi wykryć spadek terenu dzięki ultradźwiękowemu czujnikowi HC-SR04. Wyposażony w możliwość alarmowania dźwiękowego na wypadek przekroczenia zakresu bezpiecznych odczytów z czujników. Wypisuje również na ekranie lcd wiadomości ostrzegawcze oraz błędy. Stacja jest wyposażona w zdolność samodzielnego przemieszczania się oraz wysyłania wiadomości email z pomiarami. Robot jest autonomiczny, posiada własne zasilanie akumulator umożliwiający nieprzerwaną prace przez 12 godzin.
Wykonawcą projektu jest Dawid Kulpiński, projekt szczegółowo opisany zostanie opublikowany w ramach pracy dyplomowej.